Research Area
Reinforcement Learning
Our research in reinforcement learning focuses on developing intelligent agents that can follow the expert behavior.
Imitation Learning
- Behavior Cloning
- Offline RL
- Inverse RL

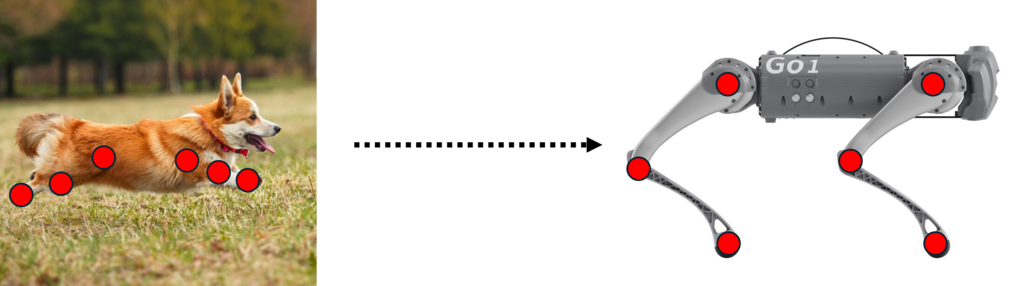
Embodied AI
- Cross Embodiment
- Domain Randomization
- Model Approximation
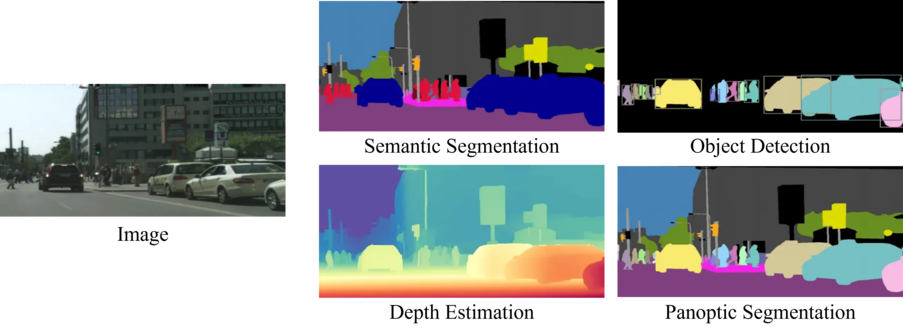
Deep Learning Vision
We focus on developing robust and efficient vision systems for robots, enabling them to understand and interact with their environment effectively.
Perception
- Semantic Segmentation
- Depth Estimation
- Object Detection
- Panoptic Segmentation
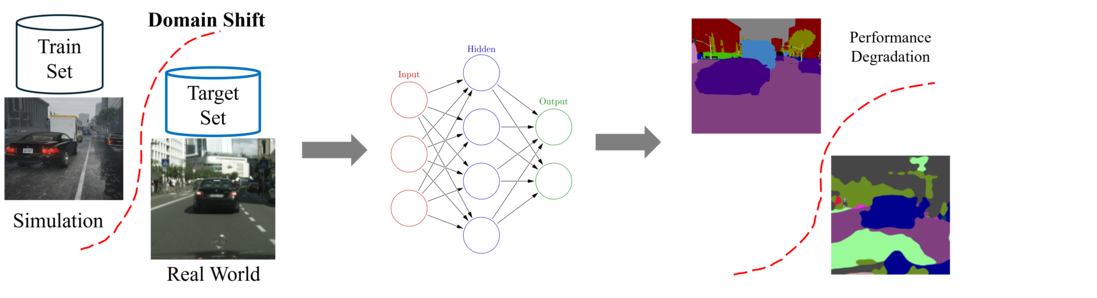
Robust Vision
- Image Restoration
- Domain Adaptation
- Domain Generalization
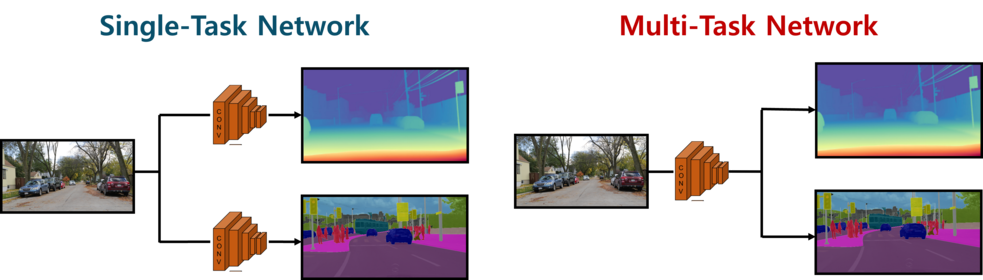
Efficient Vision
- Multi-Task Learning
- Knowledge Distillation
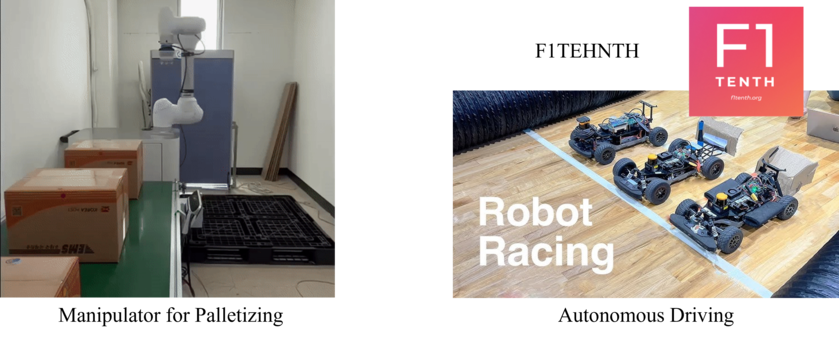
Robotics
Our robotics research focuses on applying our advances in reinforcement learning and computer vision to real-world robotic systems.
- Mobile Vehicles
- Autonomous Vehicle System
- Manipulators (Robot Arms)
- Manufacturing System